⚡ Step 7: Add the Servo Assembly to the Camera Assembly
You will now add the Servo Assembly to the Camera Assembly. Here are the materials you will need:
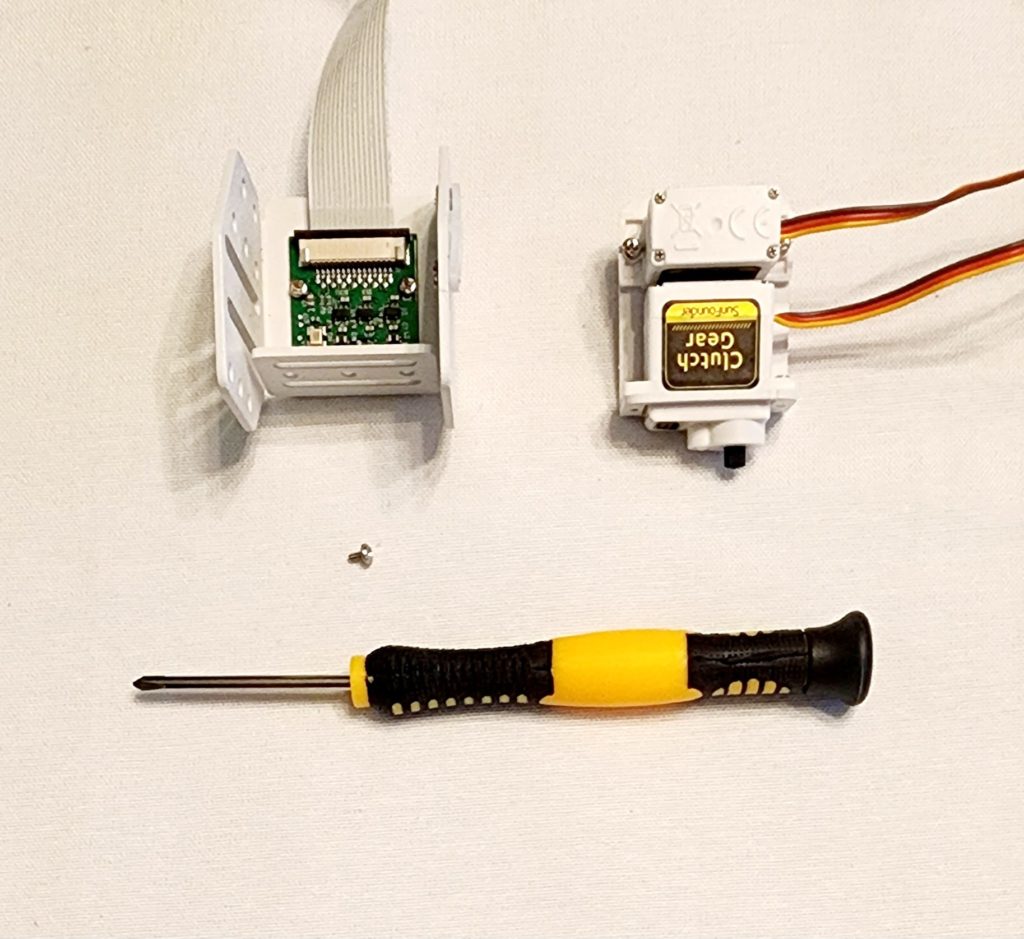
Attach the Servo Mount Assembly to the Camera Assembly
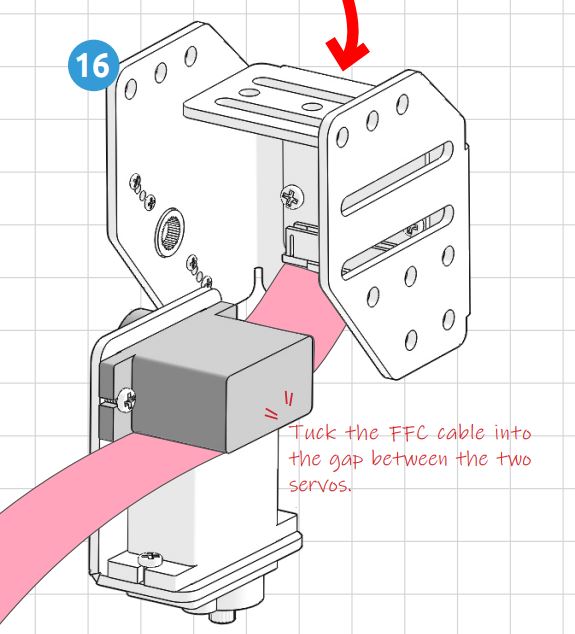
First, tuck the FFC cable into the gap between the two servos as shown below.
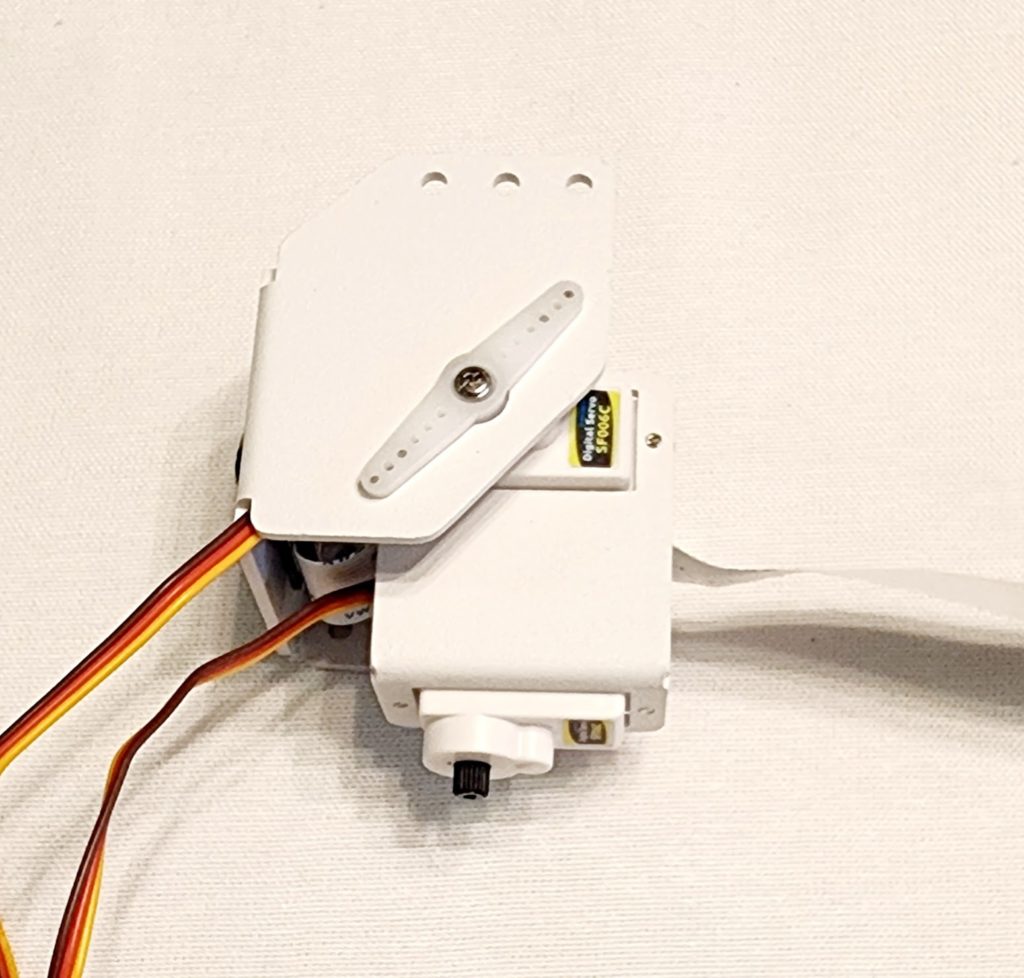
Next, make sure to plug the camera servo into the D11 pins on your robot hat and use the Servo Screw (included in the Rocker Arm bags) to attach the Servo Assembly to the Camera Assembly as shown below. This will ensure that your camera is as close to the correct starting position as possible.